
RumiCar新潟支部からのご報告
自動運転プロジェクト「RumiCar」は、現在レベル2の段階にありますが、私たちは今、完全自動運転である「レベル5」の実現を目指し、新たな試行錯誤のフェーズに突入しました。
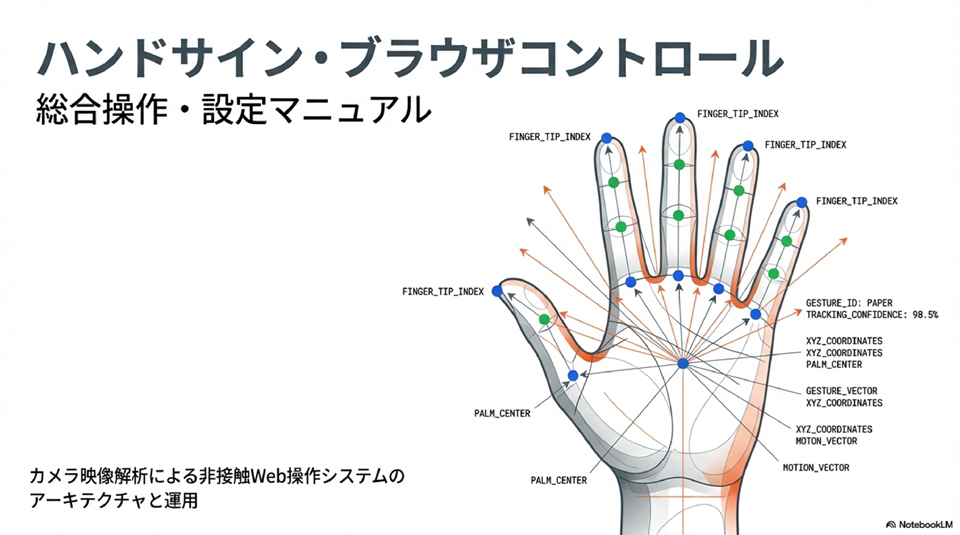
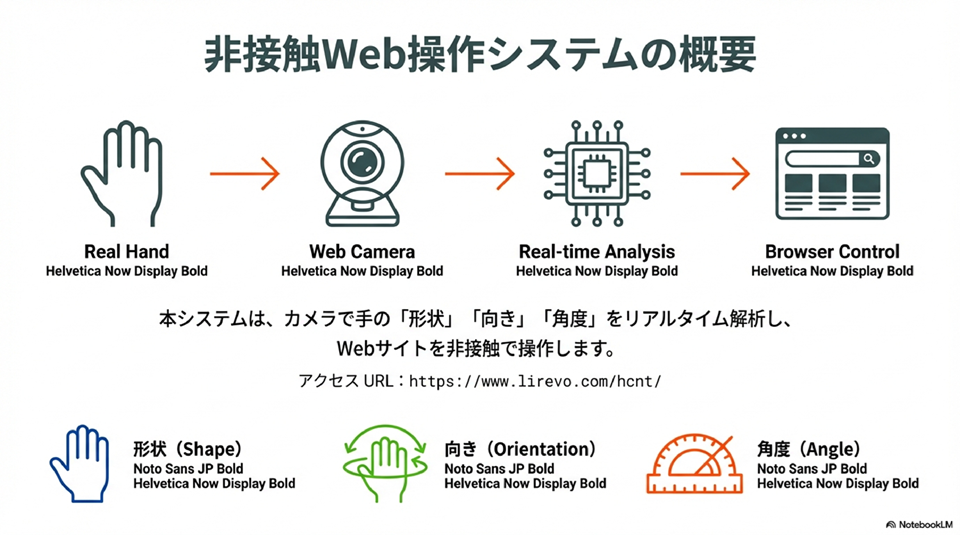
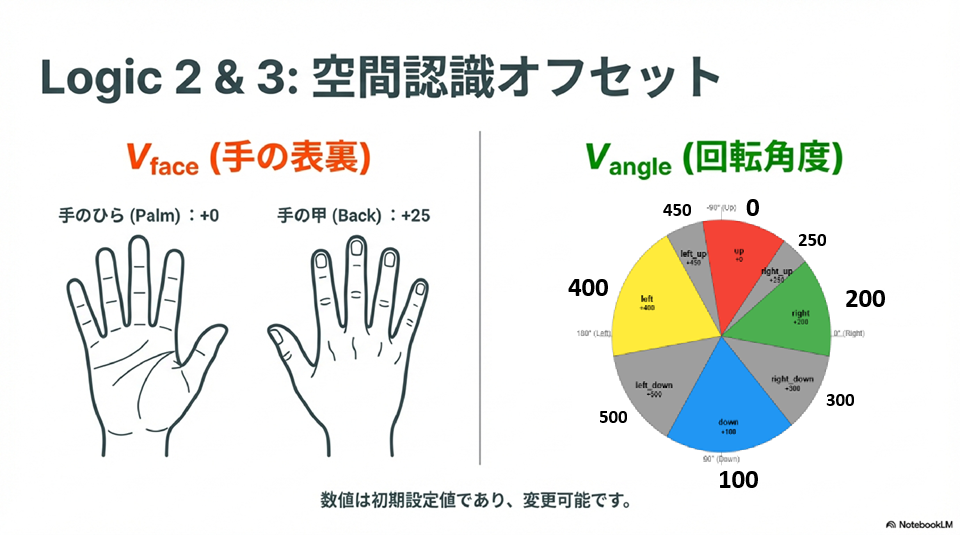
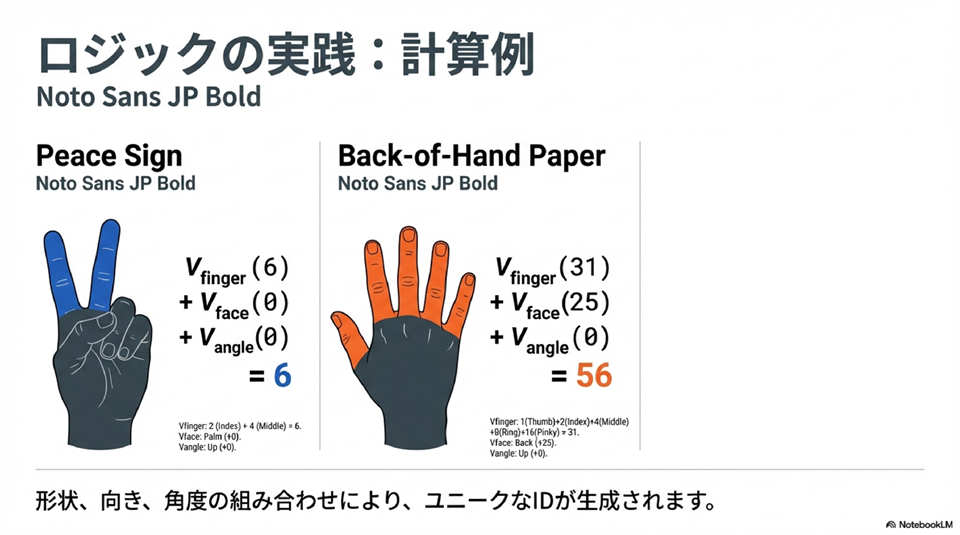
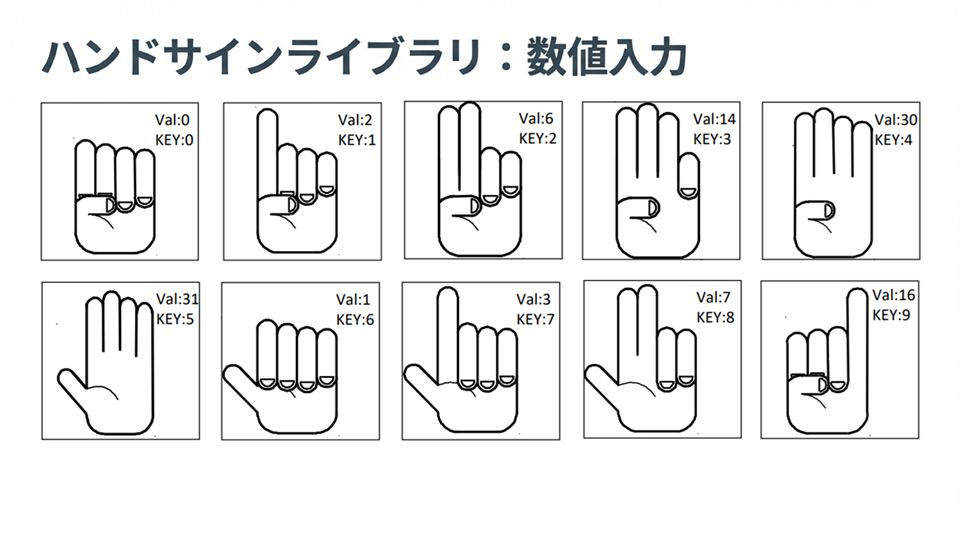
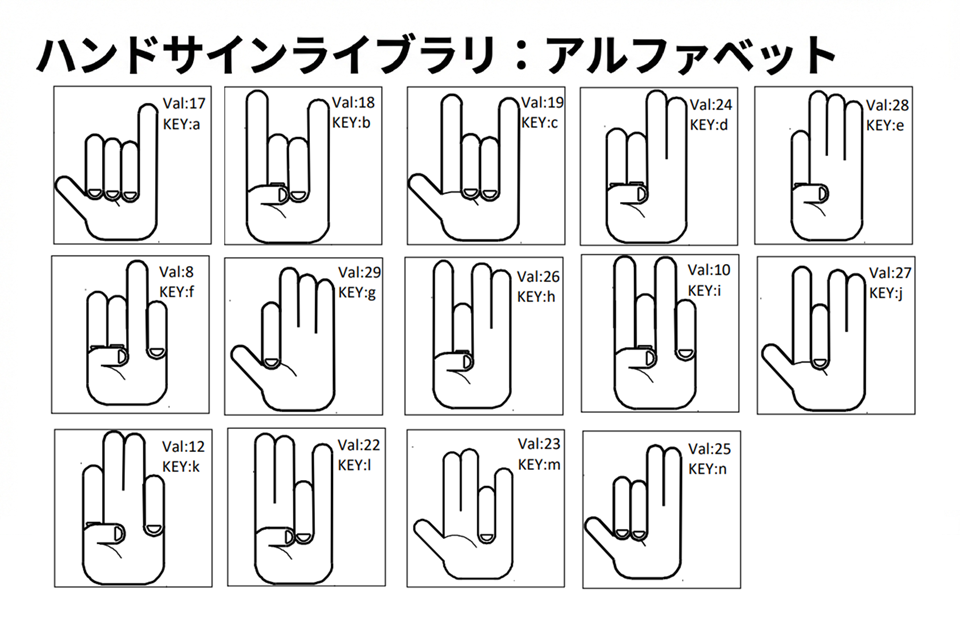
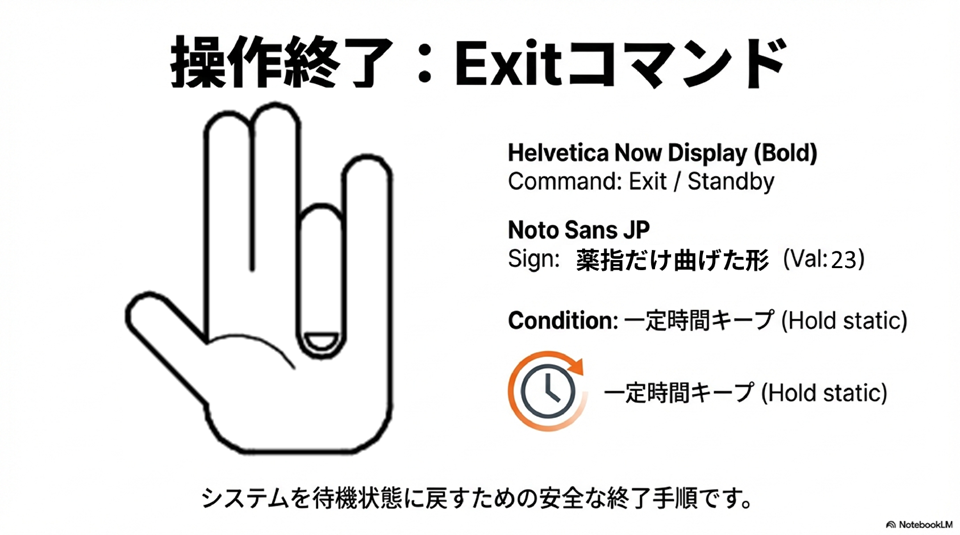
その大きな一歩として、まずは高度な画像処理技術を習得するため、Googleのオープンソース・フレームワークである「MediaPipe(メディアパイプ)」を採用。カメラ映像からリアルタイムで手の動きを解析し、マシンを操る「ハンドサインリモコン」を実装しました 。
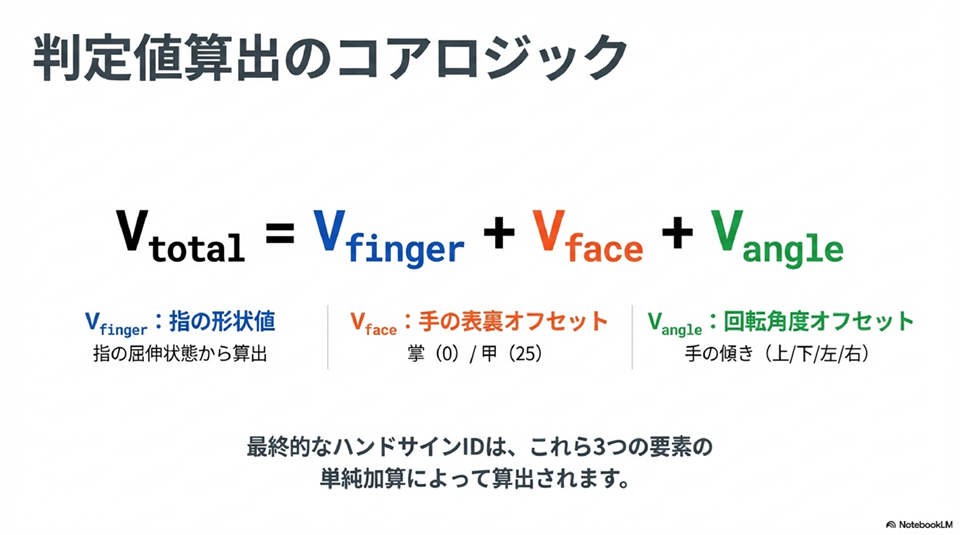
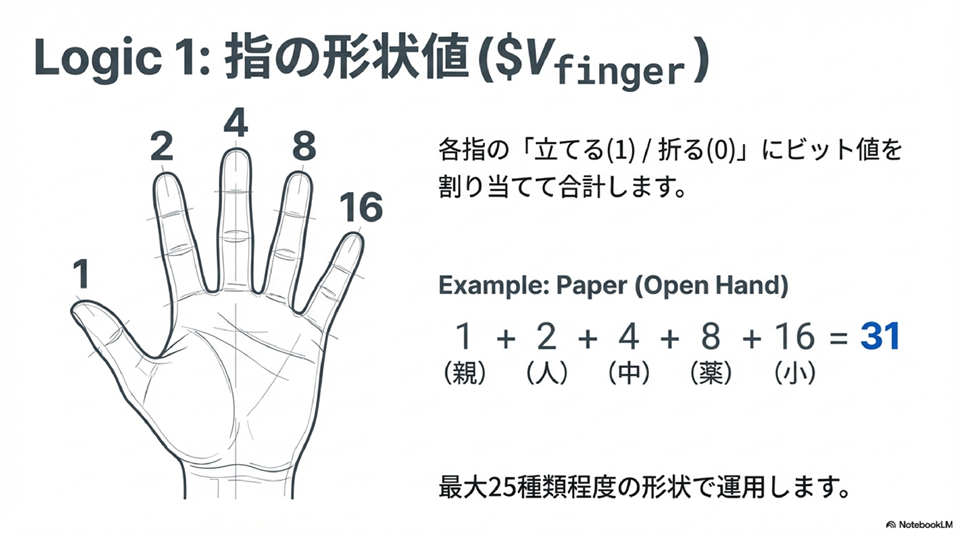
本ページでは、このシステムの仕組みを解説しています。
システム解説
ハンドサインのサイトはこちらで試せます
テストサイトで体験する
※WEBカメラを使える状態でお試しください。